
January 26, 2023
Esther Anyaegbu
Tags: GNSS Foresight

NOTE: This blog is a summary of a paper delivered at ION GNSS+ 2022, titled GNSS Performance Evaluation for Deep Urban Environments using GNSS Foresight.
If drones and autonomous vehicles are to operate safely in deep urban areas, one major technical problem needs to be overcome.
Tall buildings and other features can block an autonomous vehicle’s line of sight to overhead navigation satellites, impairing its ability to compute an accurate position on the road or in the air. While GNSS receivers use signal processing algorithms to mitigate the loss of line of sight, those algorithms aren’t always 100% effective in every scenario.
If we want to use self-navigating vehicles like emergency response drones, inspection drones and autonomous delivery trucks in our cities, a better solution needs to be found.
At Spirent we believe that GNSS forecasting has a key role to play—and in live tests, we’ve shown that GNSS forecasting can elegantly overcome navigation issues caused by signal degradation in built-up areas.
The key issue that GNSS receivers have to contend with in deep urban areas is multipath. This occurs when signals aren’t completely blocked by buildings, but instead reflect off them, causing their paths to fragment and elongate. If these effects aren’t sufficiently mitigated in the receiver, there is a high risk that the receiver will calculate an inaccurate position due to the extended signal paths.
Many receivers use algorithms to detect and filter out multipathed signals, leaving only line-of-sight signals on which to perform the position calculation. However, the deeper into an urban canyon the vehicle travels, the more multipathed signals there are in the environment, and the harder it becomes for the receiver to distinguish between line-of-sight and multipathed signals.
Often, a receiver has to fall back on inertial measurement units, such as accelerometers, gyroscopes and wheel-speed sensors, to continue calculating its position. But these sensors can only maintain accuracy for a short time before starting to drift.
Spirent has long envisaged that GNSS signal forecasting can remove these barriers to satellite positioning and navigation accuracy in urban areas. If a GNSS receiver knows which signals in the environment are likely to be contaminated by multipath, its signal processing algorithm can distinguish more accurately between LOS and multipath signals, enabling more accurate positioning.
Similarly, with an accurate GNSS signal forecast for the environment ahead, an autonomous vehicle can take steps to avoid any area where signals are likely to be significantly disrupted, or it can switch to an auxiliary navigation solution for the duration of the disruption.
For autonomous vehicle operation planning, a GNSS signal forecast can help operators navigate around signal disruptions. In the case of drone-based building inspections, for example, inspections can be scheduled for times when the forecast shows the drone will be able to navigate safely to every part of the building it needs to inspect.
These are the principles behind our cloud-based GNSS Foresight forecasting solution, which is available today as a continuous feed (Foresight Live), or as one-off site-specific forecasts (Foresight Risk Analysis). To demonstrate the effectiveness and value of GNSS Foresight, Spirent has conducted multiple tests for customers around the world, including the one illustrated below.
 The results of this drive test in Indianapolis show how quickly the signal environment can change in a deep urban environment, and how quickly a receiver can lose position accuracy when it encounters multipath signals.
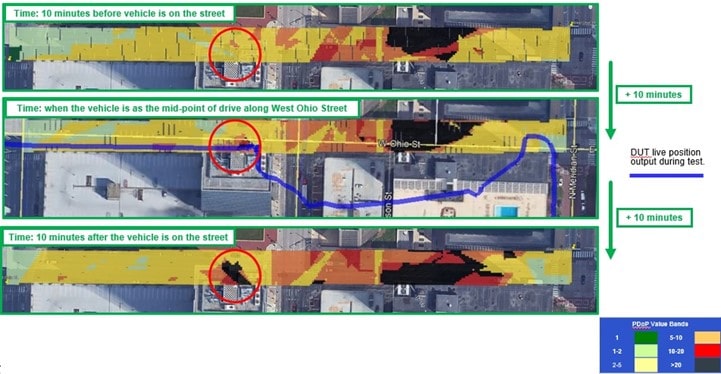
The results of this drive test in Indianapolis show how quickly the signal environment can change in a deep urban environment, and how quickly a receiver can lose position accuracy when it encounters multipath signals.The three horizontal bands show an aerial view of the test route, which starts on the left in a clear area with only a few low buildings, and proceeds into the built-up downtown area. Dilution of precision (DoP) of the satellite signals is shown as a heatmap generated by our GNSS Foresight solution. Green and yellow areas indicate low dilution, while red and black areas indicate the highest dilution of precision. Circled in red is a junction with traffic signals at the entrance to the downtown area.
The upper band shows the drive route 10 minutes before the test, when the signal environment at the junction was fairly clear. However, the middle band shows that when our test drive began 10 minutes later, the position of the navigation satellites in the sky had shifted, resulting in more signal obscuration and multipath contaminated signals at the junction and corresponding high rates of DoP.
The blue line shows the actual position output by our test receiver during the drive. On stopping at the junction it is immediately affected by the multipathed signals, causing a significant drop in accuracy that doesn’t recover for a couple of blocks – a major safety risk for GNSS-reliant vehicles. The bottom band shows the signal environment 10 minutes later, where the same area is even more subject to blocked and multipathed signals.
These and other tests show that even multi-GNSS receivers like the one used in our test drive struggle to mitigate multipathed signals in deep urban environments where a high proportion of signals received may be contaminated by multipath. A signal forecasting solution that can improve multipath signal mitigation can significantly improve receiver performance.
In addition, the tests we have conducted to date—with both drones and ground-based vehicles—consistently show that the forecasts and heatmaps generated by Spirent GNSS Foresight correlate very closely with the live signal environments encountered by the receiver. Spirent is happy to share and compare data from Foresight with developers and users of GNSS-dependent equipment, to demonstrate the accuracy and reliability of our forecasts.
With the ability to forecast accurately for up to three days ahead, Spirent GNSS Foresight offers significant value for GNSS chipset developers and operational users of GNSS-dependent equipment alike.
If you’d like more information about these Foresight test results, or if you’d like to see a demo or take a trial of Foresight, please get in touch.
