
September 23, 2021
Jeremy Bennington
Tags: Autonomous Vehicles, UAS

The autonomous vehicle future is nearly here. The benefits are well established – autonomous drones can deliver goods without congesting streets, fly to incident locations to search for casualties, or rush medical samples to labs for rapid diagnosis. Self-driving cars and trucks can improve road safety, reduce CO2 emissions, and bring mobility to millions of people.
Many of the technical barriers to vehicle autonomy have been overcome, with sophisticated multi-sensor positioning engines enabling vehicles to navigate accurately, and advances in AI and edge computing giving them the intelligence to make sensible split-second driving decisions.
But a number of roadblocks still remain before fully-autonomous vehicles can get the green light. One of those roadblocks is the reliability of satellite navigation signals in built-up areas.
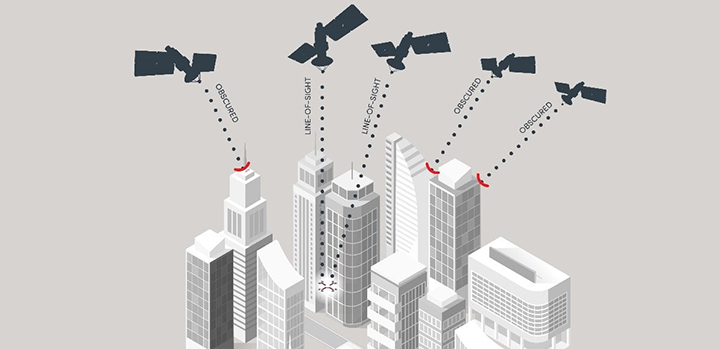
As we explored in a previous blog, while signals from global navigation satellite systems (GNSS) like GPS are available almost everywhere and almost all the time, they can be intermittently obscured by buildings or other landscape features. Depending on the extent of the obscuration, these momentary blockages can cause a GNSS receiver to temporarily lose lock on the signal.
That’s not such a problem when a human is in the driving seat (or at the drone controls) and can navigate by looking where they’re going. But when a self-driving vehicle relies on GNSS as a key input to its positioning engine, loss of signal – even for a second or two – is something that operators want to avoid, and that regulators are likely to view as a serious safety risk.
Without a way of knowing when and where GNSS will be reliable, organizations that plan to use autonomous vehicles are finding they have to impose constraints on their operations.
Some have decided that only rural routes – where there’s a good view of the open sky – are safe, limiting the number of locations they can serve. Others intend to stick to pre-mapped routes that the vehicle can navigate without the aid of GNSS. Many are simply waiting for the problem to be solved before moving ahead with their plans.
Regulators, meanwhile, are unlikely to approve widespread Beyond Visual Line of Sight (BVLOS) operation for drones, or autonomous vehicle use on public roads, until this issue is resolved.
So, if we’re to unlock the full potential of autonomous navigation, something needs to be done. Many of the most compelling use cases for vehicle autonomy apply to urban locations – whether it’s robotaxis for urban mobility or drone package delivery in congested areas. The ability to drive or fly in more places, rather than stick to a limited number of routes, will also make autonomous operation more efficient and less energy intensive.
It’s a problem that Spirent has been working to solve for some time, working closely with customers and regulators in the aviation and transportation industries, and drawing on our 35+ years at the forefront of GNSS test and measurement.
The resulting solution is Spirent GNSS Foresight, a new and unique set of cloud-based services that address the issue of GNSS signal obscuration in a low-cost and easy-to-use way, without the need for additional sensors or hardware on the drone or autonomous vehicle.
Our Foresight services don’t involve making GNSS signals available everywhere (an impossible task, as even the most accurate multi-GNSS receivers still encounter blockages in certain places at certain times). Instead, they use a combination of 3D maps and precise satellite orbital information to forecast exactly when and where GNSS positioning and navigation will be reliable.
By combining these data sources and using ray-casting to trace the path of each satellite’s signal, Spirent GNSS Foresight can accurately forecast GNSS reliability in any square meter of any location, from 0-400 feet above ground level (AGL), second-by-second, and for any time of day – from the current moment up to three days ahead.
With information from Foresight available, operators can make informed decisions about when and where it’s safe to navigate. Routes can be assessed in advance to identify any potential GNSS issues, allowing operators to choose a different time or route if reception is likely to be compromised. And a Foresight feed to the vehicle or control room means route change decisions can be made mid-journey if Foresight predicts unreliable GNSS reception ahead.
Operators can also ask Spirent to conduct a one-off GNSS risk assessment of a given location, using Foresight to calculate best- and worst-case scenarios for GNSS reliability at that site. This can save valuable time and lead to more informed decision-making when planning locations of vertiports or autonomous vehicle garages.
For organizations working on defining, building, and assuring the future of autonomous vehicle navigation, Spirent GNSS Foresight brings that reality one step closer. It’s available directly from Spirent or as a Supplemental Data Service (SDS) from Spirent partners as an annual subscription covering a specific geographical area at ground level and up to 100 metres AGL.
Check out our new eBook, Achieving Reliable GNSS Performance for Autonomous UAS Navigation, to learn more about assuring GNSS reliability with Foresight.
